I finally got around to trying my rotary encoders out on an 18F24K22 using DT interrupts.
I kept things simple; checking for only 1 movement per click (detent). This encoder also has a momentary ON switch.
Code:
'***************************************************************************
'* Name : 18F24K22 encoder.pbp *
'* Author : Demon *
'* Date : Sep 5 2012 *
'* Version : 1.0 *
'* Hardware : PIC 18F24K22, internal oscillator, 8 MHz *
'* : ICSP *
'* : MeLabs U2 Programmer v4.32 *
'* Software : PIC Basic Pro v2.60C *
'* : MicroCode Studio Plus v2.2.1.1 *
'* : MPASM v5.46 *
'* CONFIG : - if you use these, you must comment the ones in the *
' .INC file in PBP folder *
' - available options at the bottom of P*.INC file in *
' MPLAB TOOLS/MPASM SUITE folder *
'***************************************************************************
asm
__CONFIG _CONFIG1H, _FOSC_INTIO67_1H & _PLLCFG_OFF_1H & _PRICLKEN_ON_1H & _FCMEN_OFF_1H & _IESO_OFF_1H
__CONFIG _CONFIG2L, _PWRTEN_ON_2L & _BOREN_SBORDIS_2L & _BORV_285_2L
__CONFIG _CONFIG2H, _WDTEN_OFF_2H
__CONFIG _CONFIG3H, _PBADEN_ON_3H & _HFOFST_OFF_3H & _MCLRE_EXTMCLR_3H
__CONFIG _CONFIG4L, _STVREN_ON_4L & _LVP_OFF_4L & _XINST_OFF_4L & _DEBUG_OFF_4L
endasm
;--- Oscillator speed ------------------------------------------------------
DEFINE OSC 8
CLEAR
;--- Setup Interrupts ------------------------------------------------------
INCLUDE "DT_INTS-18.bas" ; Base Interrupt System
INCLUDE "ReEnterPBP-18.bas" ; PBP Re-entry for external interrupt
ASM
INT_LIST macro ; IntSource, Label, Type, ResetFlag?
INT_Handler INT_INT, _ExternalInterrupt0, PBP, yes
endm
INT_CREATE ; Creates the interrupt processor
ENDASM
@ INT_ENABLE INT_INT ; enable external (INT) interrupts
;--- Setup Registers -------------------------------------------------------
OSCCON = %01100110 ' OSCILLATOR CONTROL REGISTER
OSCTUNE = %00000000 ' OSCILLATOR TUNING REGISTER
PMD0 = %11111111 ' PERIPHERAL MODULE DISABLE REGISTER 0
PMD1 = %11111111 ' PERIPHERAL MODULE DISABLE REGISTER 1
PMD2 = %00001111 ' PERIPHERAL MODULE DISABLE REGISTER 2
INTCON2=%10000100 ' INTERRUPT CONTROL 2 REGISTER
ANSELA = 0 ' Digital I/O
ANSELB = 0 ' Digital I/O
ANSELC = 0 ' Digital I/O
;--- Setup Port directions -------------------------------------------------
TRISA = %00000000 ' Set port A pins to output
TRISB = %00000001 ' Set port B pin 0 to input, others output
TRISC = %00000110 ' Set port C pins 1,2 to input, others output
;--- Pins ------------------------------------------------------------------
WiperA VAR PortB.0 ' Interrupt 0
WiperB VAR PortC.2
Switch VAR PortC.1
LedPower VAR PortB.5
;--- Variables -------------------------------------------------------------
LEDS VAR BYTE ' 8 Leds connected on Port A
;--- Program Start ---------------------------------------------------------
start:
Pause 200 ' Let PIC stabilize
Ledpower = 0
Leds = %00000001
PortA = leds
;--- The Main Loop ---------------------------------------------------------
mainloop:
if Switch = 1 then
Ledpower = 1 ' Turn ON Led
pause 200 ' Debounce
Ledpower = 0 ' Turn it back OFF
endif
Goto mainloop
end
'---[INT - interrupt handler]---------------------------------------------------
ExternalInterrupt0:
if wiperb = 1 then
if leds.7 = 0 then
LEDS = LEDs << 1 ' Leds blink counter-clockwise
endif
else
if leds.0 = 0 then
leds = leds >> 1 ' Leds blink clockwise
endif
endif
PortA = leds
pause 100
@ INT_RETURN
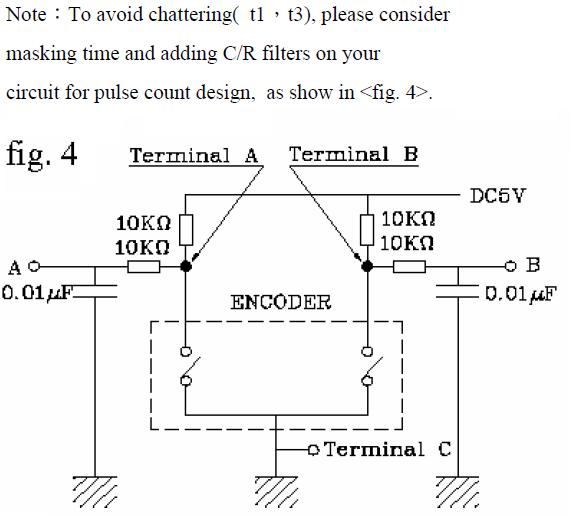
I used both 0.01uF and 0.1uF caps to improve debounce and wired the C pin straight to Vss (only check wiper A and B). This is the recommended circuit by the manufacturer:
Robert





 .
.




 !).
!).


Bookmarks