



MIBAM (pronounced "My BAM")
Which stands for ... "Mirror Imaged Bit Angle Modulation"
An include module for PicBasic Pro.
http://www.pbpgroup.com/files/MIBAM/MIBAM.swf
After a year and a half of playing with this thing ... One statement from RadikalQ3 made all my problems go away.
Thank you Radikal dude!
Also many thanks to BCD for beta testing the module.
I really liked the name "BAM-BAM", but MIBAM is probably a more descriptive acronym, so I've changed it. No matter what you call it ... I think you'll find that My "BAM" ... was the sound of hitting the nail on the head.
This module is a modification of the BAM (Bit Angle Modulation) idea presented by Artistic License.
For more information about BAM, it's blinking problem and how this program came to be, please see this thread ...
http://www.picbasic.co.uk/forum/showthread.php?t=7393
Click image for larger Interactive version.
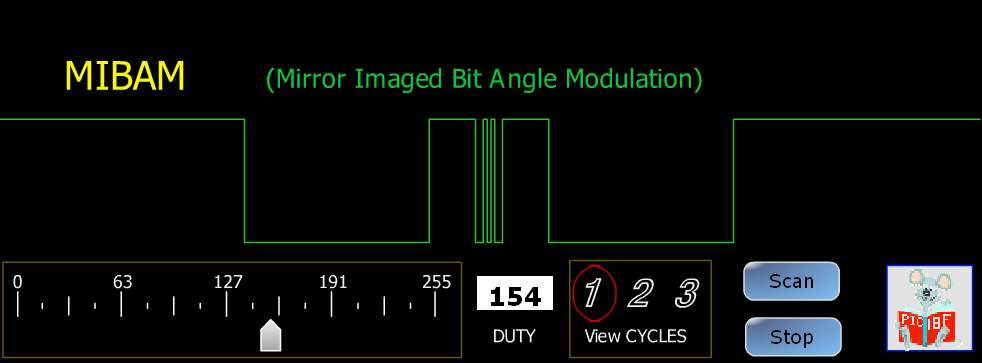
Click image for larger Interactive version.
What can it do?
Well ... it can turn almost every pin on your PIC into an LED dimmer. (limitations apply)
First, let's take a look at the basic MIBAM setup,
For an RGB LED (3 outputs) it might look like this ....
At this point, each BAM_PIN has been automatically set to OUTPUT, and the PINs will idle LOW until the Dutycycle variables are changed.Code:;----[ MIBAM Setup ]-------------------------------------------------------- BAM_COUNT CON 3 ; How many BAM Pins are used? INCLUDE "MIBAM.pbp" ; Mirror Image BAM module RED VAR BYTE GREEN VAR BYTE BLUE VAR BYTE ASM BAM_LIST macro ; Define PIN's to use for BAM BAM_PIN (PORTB,0, RED) ; and the associated Duty variables BAM_PIN (PORTB,1, GREEN) BAM_PIN (PORTB,2, BLUE) endm BAM_INIT BAM_LIST ; Initialize the Pins ENDASM ;_________________________________________________ __________________________
The Dutycycle range is from 0-255, 0 = OFF, 255 = brightest.
To change the brightness of an LED simply set the Dutycycle variable to the desired level.
You don't need to call any subroutines.
Here's an example of just fading the RGB LED's up and down.
FOR loops always leave the variable 1 count further than the loop specifies.Code:Speed CON 20 ; Smaller=Faster Brightness CON 200 ; Max DutyCycle Main: FOR Red = 0 to Brightness -1 ; Ramp up 1 by 1 PAUSE Speed NEXT RED FOR GREEN = 0 to Brightness -1 PAUSE Speed NEXT GREEN FOR BLUE = 0 to Brightness -1 PAUSE Speed NEXT BLUE FOR Red = Brightness to 1 STEP -1 ; Ramp down 1 by 1 PAUSE Speed NEXT RED FOR GREEN = Brightness to 1 STEP -1 PAUSE Speed NEXT GREEN FOR BLUE = Brightness to 1 STEP -1 PAUSE Speed NEXT BLUE GOTO Main
when using direct FOR loops, you must account for the difference.
The module will work on most 16F's, ALL 18F's and some 12F's
If you are using a 14-bit PIC. You'll need to add these variables to your program for the Interrupt Context.
For 18F's you don't need to add these save locations. And they may cause errors if you do.
Limitations and RequirementsCode:;____[ For 12F/16F only - Interrupt Context save locations]_________________ wsave var byte $20 SYSTEM ' location for W if in bank0 ;wsave var byte $70 SYSTEM ' Alternate save location for W ' if using $70, comment out wsave1-3 ' --- IF any of these next three lines cause an error ?? ------------------- ' Comment them out to fix the problem ---- ' -- The chip being used determines which variables are needed ------------- wsave1 VAR BYTE $A0 SYSTEM ' location for W if in bank1 wsave2 VAR BYTE $120 SYSTEM ' location for W if in bank2 wsave3 VAR BYTE $1A0 SYSTEM ' location for W if in bank3 '---DO NOT change these----------------------------------------------------- ssave VAR BYTE BANK0 SYSTEM ' location for STATUS register psave VAR BYTE BANK0 SYSTEM ' location for PCLATH registerAttached is the MIBAM.pbp module.
- In order to use this module, you MUST be using MPASM for the assembler.
PBP's default PM.exe assembler will not work.
- This module takes over the Interrupts on the PIC because the timing of the waveforms must be exact.
With 16F's, You can NOT use any other interrupts, this includes ON INTERRUPT.
With 18F's, The module uses High Priority interrupts, and no other High Priority interrupts can be used.
Low priority Interrupts are available, but you still can NOT use ON INTERRUPT.
- The module uses Timer1, and it cannot be used for any other purposes.
Consequently, the PIC being used must have a Timer1.
- The number of LED's you can use is limited by the OSC frequency.
It's not that the module uses so much processor time that it needs more speed.
The limitation is the LSB (Least Significant Bit) of the DutyCycle, which is so short that it doesn't leave much time to do a whole lot of code.
@ 4Mhz, you can only run 4 LEDs MAX. This can be useful for RGB LED's on small chips.
@ 20Mhz, you can run 20 LEDs since there are more instructions available per period.
@ 48Mhz, you can run 48 LEDs, and anywhere in-between you can have the equivelant number of LEDs to match the OSC frequency.
If you attempt to use too many LEDs for a specific OSC frequency, the program will give a warning to indicate the results will be "Blinky".
- DO NOT overload your PIC.
A PIC can only source so much current. The specific amount is listed in the datasheet for the PIC you are using.
If you are driving a lot of LED's, you may need to buffer them with transistors or various other drive mechanisms.
Download and unzip it to your PBP folder. (The one with PBPW.exe, usually C:\PBP)



Bookmarks